



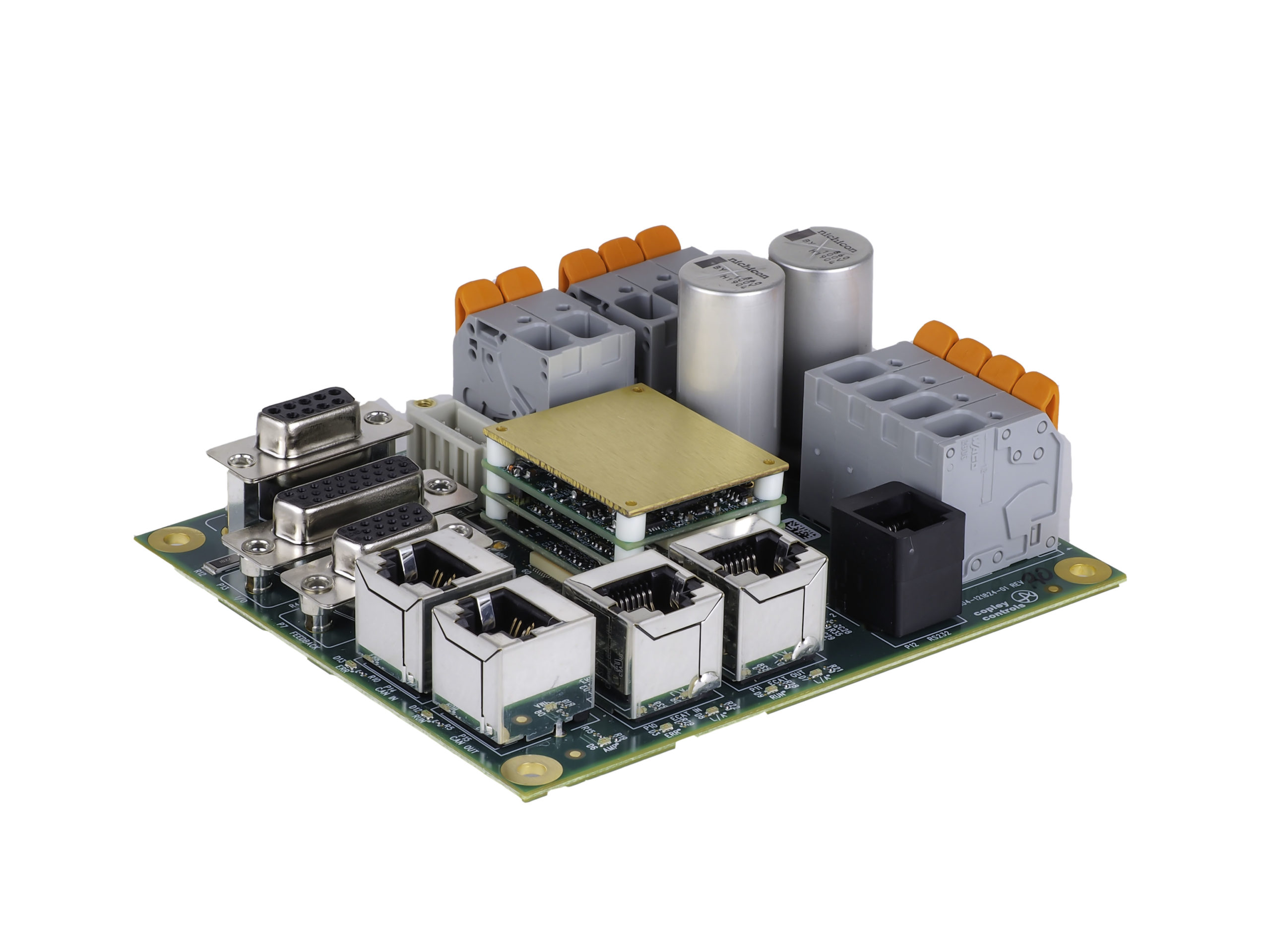














Copley Controls Accelnet Plus Panel EtherCAT
Feedback BiSS, SSI, Absolute A, Endat, Panasonic, Tamagawa, Sanyo Denki, Analog Sin/Cos, Incremental, Digital Halls, Aux encoder/ encoder out The BEL is a high-performance, DC powered drive for position, velocity, and torque control of brushless and brush motors via EtherCAT, an Ethernet-based fieldbus. The BEL operates as an EtherCAT slave using the CANopen application protocol over EtherCAT (CoE). Supported modes include: Profile Position-Velocity-Torque, Cyclic Synchronous Position-Velocity-Torque, Interpolated Position Mode (PVT), Homing, and CSTCA (Cyclic-sync torque with commutation angle). Feedback from both incremental and absolute encoders is supported. A multi-mode encoder port functions as an input or output depending on the drive’s basic setup. Accelnet Plus Panel EtherCAT BEL-090-06 Continuous Current: 3A Peak: 6A BEL-090-06-R Continuous Current: 3A Peak: 6A BEL-090-14 Continuous Current: 7A Peak: 14A BEL-090-14-R Continuous Current: 7A Peak: 14A BEL-090-30 Continuous Current: 15A Peak: 30A BEL-090-30-R Continuous Current: 15A Peak: 30A
{kind=link}